Tasking Event-B Overview: Difference between revisions
imported>Andy |
imported>Andy |
||
| (102 intermediate revisions by the same user not shown) | |||
| Line 8: | Line 8: | ||
|- | |- | ||
|Machine Type | |Machine Type | ||
| | |[http://wiki.event-b.org/index.php/Tasking_Event-B_Overview#Tasking_Machines AutoTask], [http://wiki.event-b.org/index.php/Tasking_Event-B_Overview#Shared_Machines Shared], [http://wiki.event-b.org/index.php/Tasking_Event-B_Overview#The_Environ_Machine Environ] | ||
|- | |- | ||
| | |[http://wiki.event-b.org/index.php/Tasking_Event-B_Overview#Control_Constructs_used_in_the_Task_body Task body] | ||
|Sequence, Loop, Branch, | |Sequence, Loop, Branch, Event, Output | ||
|- | |- | ||
|Task Type | |[http://wiki.event-b.org/index.php/Tasking_Event-B_Overview#Tasking_Machines Task Type] | ||
|Periodic | |Periodic, Repeating, OneShot | ||
|- | |- | ||
|Priority | |Priority | ||
| | | n | ||
|} | |} | ||
</center> | </center> | ||
==== Tasking Machines ==== | ==== Tasking Machines ==== | ||
The following constructs relate | The following constructs relate to Tasking and Environ Machines, and provide implementation details. Timing of periodic tasks is not modelled formally. Tasking and Environ Machines model Ada tasks, so they can be map easily to Ada; and can implemented in C using the pthread library, or in Java using threads. | ||
* Tasking Machines may be | * Tasking Machines may be one of the following types: | ||
** AutoTasks - | ** AutoTasks - Anonymous Tasks running from start-up. | ||
''Auto Tasks'' are tasks that will be declared and defined in the ''Main'' procedure of the implementation. The effect of this is that the ''Auto Tasks'' are created when the program first loads, and then activated (made ready to run) before the ''Main'' procedure body runs. | ''Auto Tasks'' are tasks that will be declared and defined in the ''Main'' procedure of the implementation. The effect of this is that the ''Auto Tasks'' are created when the program first loads, and then activated (made ready to run) before the ''Main'' procedure body runs. | ||
* Tasking and Environ Machines options are: | |||
** TaskType - Defines the scheduling, cycle and lifetime of a task. i.e. one-shot periodic or triggered. The period of a task is specified in milliseconds. | |||
** Priority - An integer value is supplied, the task with the highest value priority takes precedence when being scheduled. The default priority is 5. | |||
==== Shared Machines ==== | ==== Shared Machines ==== | ||
A Shared Machine | A Shared Machine models a protected resource, such as a monitor. It may be implemented in Ada as a Protected Object, in C using mutex locking, or in Java as a monitor. | ||
* | * A Shared Machine is identified using the ''Shared Machine'' annotation. | ||
==== The Environ Machine ==== | ==== The Environ Machine ==== | ||
An Environ machine is a model of the environment. It can be used to generate code for use in a simulation, or discarded | An Environ machine is a model of the environment. It can be used to generate code for use in a simulation, or be discarded in the case that a simulated environment is not required. | ||
* An Environ Machine is identified using the ''Environ Machine'' annotation. | |||
=== | === Control of Program Flow === | ||
At the stage | At the implementation stage we need to think about controlling the flow of execution; and where interaction with the environment is concerned, how events should be implemented. The following section describes the constructs that we have introduced to facilitate this. | ||
==== Control Constructs ==== | ==== Control Constructs used in the Task body ==== | ||
Each Tasking Machine has a ''task body'' which contains the flow control (algorithmic constructs). | Each Tasking Machine has a ''task body'' which contains the flow control (algorithmic constructs). | ||
| Line 65: | Line 52: | ||
** Branch - choice between a number of mutually exclusive events. | ** Branch - choice between a number of mutually exclusive events. | ||
** Loop - event repetition while it's guard remains true. | ** Loop - event repetition while it's guard remains true. | ||
** | ** Event - a wrapper for the Event-B element (soon to be redundant). | ||
** Text Output - writes textual output to the screen. | ** Text Output - writes textual output to the screen. | ||
The syntax for task bodies, as used in the Rose TaskBody editor, is as follows: | |||
* | <br/> | ||
[[Image:Syntax2.png]] | |||
<br/> | |||
The ''String'' will be an event name, a variable name, or a text fragment to be output to the screen. The concrete syntax is shown in bold red font. '*' indicates 0 or more; [] indicates 0 or 1. | |||
In the | ==== Translating Branches ==== | ||
In the explanation that follows, there may be a number of sub-branches, so we index the events of sub-branches (if they exist) with ''i''. Events can be used in the branching constructs, ''if'', ''elseif'' or ''else'', in the following way, | |||
if evt_1 | |||
[ elseif evt_i ]* | |||
else evt _ n | |||
where i = 2..(n-1) | |||
The events are translated to pseudocode in the following way: | |||
if( g_1 ) then a_1 | |||
[ elsif( g_i ) then a_i end ]* | |||
else a_n end | |||
However, the guards of each branch must be disjoint; and of all branches must be complete. | |||
So the guards of each event should be as follows; | |||
if evt_1 = g_1 -> a_1 // evt_1 | |||
[ elseif not(g_(i-1)) & g_i -> a_i ] // evt_i starting from ''i'' = 2 | |||
else not(g_(i-1)) -> a_n // there of no guards ''g_n'' | |||
In each sub-branch the guards of the preceding branches are negated, and the current guard added. The current guard is translated to the branch condition in the code, and the other guards are redundant. The ''else'' branch is an exception since it has no guard of its own. In a future enhancement we can produce proof obligations to show that the branch is disjoint and guard coverage is complete. | |||
===== Event Translation ===== | |||
When an event, used in the task body, is translated to an implementation its translation depends on where it is used in the task body. The mappings are relatively simple for branch, loop, and sequence; but, in addition to the parent construct, the Event translation depends on whether it is part of a synchronization. Obviously the simplest translation is when no synchronization is involved. The translator checks the composed machine to see if the event is paired in a combined event. We say that events is a Tasking machine are local, and that events in a Shared or Environ machine, are remote. If there is no synchronization, then the actions of the local event are expanded in-line in the subroutine body. | |||
<span style="color: RED">'''Note''': As a result of the decomposition process, the decomposition tool can produce a remote event, without a corresponding local event. This happens when modelling a task that updates a (remote) shared machine, but does not pass any parameters and has no local update. A local event, with no guards and skip action, must be added manually to the tasking machine, and also added to the composed machine. The code generator will then create an implementation with a subroutine call (with no parameters) causing only remote updates. The addition of the 'dummy' event will be automated in the future. It is not necessary to have a dummy remote event if a remote event does not exist.</span> | |||
See [[ Outstanding Tooling Issues]] | |||
===== Synchronization ===== | |||
Synchronization between local events (in AutoTasks) and remote events (in shared/Environ Machines) is determined using the composed machine. To use an event simply enter its name in the TaskBody editor. The translator will in-line any local actions, and add a call to perform remote updates, and obtain remote data. | |||
Synchronization can corresponds to: | |||
* a subroutine call from a task to protected object, or, | |||
* a subroutine call from task to environment simulation (only for events used with a state-machine, when using the read/evaluate/write style of translation). | |||
* a rendezvous between a task and environ simulation (for events specified in a task body (i.e. at an time other than state-machine style above)). | |||
In the case of a subroutine call the subroutine is an atomic (with respect to an external viewer) update to state. The updates in the protected resource are implemented by a procedure call to a protected object, and tasks do not share state. | |||
=== Implementing Events === | |||
An event's role in the implementation is identified by its parent in the task body. A description follows, in general terms, of the possible implementations of an event. | |||
<span style="color: BLUE">'''Note''': An event can be to referred only '''once''' in a task body specification. Of course, shared events (in Shared machines) can be re-used, but this is done through synchronization. The task body only refers to local events</span> | |||
* Event roles in implementation: | |||
** Branching: an event is split in the implementation; guards are mapped to branch conditions, and actions are mapped to the branch body. If the branch synchronizes with a Shared machine's event then this is mapped to a procedure call. | |||
** Looping: as in branching, the event is split; the guard maps to the loop condition, and actions to to loop body. If the event synchronizes with a Shared Machine event then it is mapped to a procedure call. | |||
** Event: if the event is not contained in a branch or loop then it is one of the following: | |||
*** A local-only event - the event only contains local updates, which are expanded to update actions in the implementation. In this case guards not permitted in the event. | |||
*** A synchronizing event - local updates are expanded to become update actions in the implementation, remote updates are performed by subroutine call. Guards in the remote event may block; in Ada this is implemented as an entry barrier, and in C can be implemented using a pthread condition variable. | |||
=== | === Theories, for Generating Code === | ||
See [http://wiki.event-b.org/index.php/The_Use_of_Theories_in_Code_Generation The Use of Theories in Code Generation] | |||
=== State-Machines and Code Generation === | |||
See [http://wiki.event-b.org/index.php/State-Machines_and_Code_Generation State-Machines and Code Generation] | |||
== References == | == References == | ||
Latest revision as of 08:43, 2 September 2013
Tasking Event-B
Tasking Event-B can be viewed as an extension of the existing Event-B language. We use the existing approaches of refinement and decomposition to structure a project that is suitable for a Tasking Development. During the modelling phase parameters are introduced to facilitate decomposition. As a result of the decomposition process, parameters become part of the interface that enables event synchronization. We make use of this interface and add information (see #Implementing Events) to facilitate code generation. The tasking extension consists of the constructs in the following table.
| Construct | Options |
|---|---|
| Machine Type | AutoTask, Shared, Environ |
| Task body | Sequence, Loop, Branch, Event, Output |
| Task Type | Periodic, Repeating, OneShot |
| Priority | n |
Tasking Machines
The following constructs relate to Tasking and Environ Machines, and provide implementation details. Timing of periodic tasks is not modelled formally. Tasking and Environ Machines model Ada tasks, so they can be map easily to Ada; and can implemented in C using the pthread library, or in Java using threads.
- Tasking Machines may be one of the following types:
- AutoTasks - Anonymous Tasks running from start-up.
Auto Tasks are tasks that will be declared and defined in the Main procedure of the implementation. The effect of this is that the Auto Tasks are created when the program first loads, and then activated (made ready to run) before the Main procedure body runs.
- Tasking and Environ Machines options are:
- TaskType - Defines the scheduling, cycle and lifetime of a task. i.e. one-shot periodic or triggered. The period of a task is specified in milliseconds.
- Priority - An integer value is supplied, the task with the highest value priority takes precedence when being scheduled. The default priority is 5.
A Shared Machine models a protected resource, such as a monitor. It may be implemented in Ada as a Protected Object, in C using mutex locking, or in Java as a monitor.
- A Shared Machine is identified using the Shared Machine annotation.
The Environ Machine
An Environ machine is a model of the environment. It can be used to generate code for use in a simulation, or be discarded in the case that a simulated environment is not required.
- An Environ Machine is identified using the Environ Machine annotation.
Control of Program Flow
At the implementation stage we need to think about controlling the flow of execution; and where interaction with the environment is concerned, how events should be implemented. The following section describes the constructs that we have introduced to facilitate this.
Control Constructs used in the Task body
Each Tasking Machine has a task body which contains the flow control (algorithmic constructs).
- We have the following constructs available in the Tasking Machine body:
- Sequence - for imposing an order on events.
- Branch - choice between a number of mutually exclusive events.
- Loop - event repetition while it's guard remains true.
- Event - a wrapper for the Event-B element (soon to be redundant).
- Text Output - writes textual output to the screen.
The syntax for task bodies, as used in the Rose TaskBody editor, is as follows:
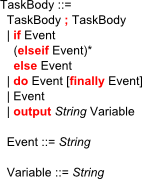

The String will be an event name, a variable name, or a text fragment to be output to the screen. The concrete syntax is shown in bold red font. '*' indicates 0 or more; [] indicates 0 or 1.
Translating Branches
In the explanation that follows, there may be a number of sub-branches, so we index the events of sub-branches (if they exist) with i. Events can be used in the branching constructs, if, elseif or else, in the following way,
if evt_1 [ elseif evt_i ]* else evt _ n
where i = 2..(n-1)
The events are translated to pseudocode in the following way:
if( g_1 ) then a_1 [ elsif( g_i ) then a_i end ]* else a_n end
However, the guards of each branch must be disjoint; and of all branches must be complete.
So the guards of each event should be as follows;
if evt_1 = g_1 -> a_1 // evt_1 [ elseif not(g_(i-1)) & g_i -> a_i ] // evt_i starting from i = 2 else not(g_(i-1)) -> a_n // there of no guards g_n
In each sub-branch the guards of the preceding branches are negated, and the current guard added. The current guard is translated to the branch condition in the code, and the other guards are redundant. The else branch is an exception since it has no guard of its own. In a future enhancement we can produce proof obligations to show that the branch is disjoint and guard coverage is complete.
Event Translation
When an event, used in the task body, is translated to an implementation its translation depends on where it is used in the task body. The mappings are relatively simple for branch, loop, and sequence; but, in addition to the parent construct, the Event translation depends on whether it is part of a synchronization. Obviously the simplest translation is when no synchronization is involved. The translator checks the composed machine to see if the event is paired in a combined event. We say that events is a Tasking machine are local, and that events in a Shared or Environ machine, are remote. If there is no synchronization, then the actions of the local event are expanded in-line in the subroutine body.
Note: As a result of the decomposition process, the decomposition tool can produce a remote event, without a corresponding local event. This happens when modelling a task that updates a (remote) shared machine, but does not pass any parameters and has no local update. A local event, with no guards and skip action, must be added manually to the tasking machine, and also added to the composed machine. The code generator will then create an implementation with a subroutine call (with no parameters) causing only remote updates. The addition of the 'dummy' event will be automated in the future. It is not necessary to have a dummy remote event if a remote event does not exist.
See Outstanding Tooling Issues
Synchronization
Synchronization between local events (in AutoTasks) and remote events (in shared/Environ Machines) is determined using the composed machine. To use an event simply enter its name in the TaskBody editor. The translator will in-line any local actions, and add a call to perform remote updates, and obtain remote data.
Synchronization can corresponds to:
- a subroutine call from a task to protected object, or,
- a subroutine call from task to environment simulation (only for events used with a state-machine, when using the read/evaluate/write style of translation).
- a rendezvous between a task and environ simulation (for events specified in a task body (i.e. at an time other than state-machine style above)).
In the case of a subroutine call the subroutine is an atomic (with respect to an external viewer) update to state. The updates in the protected resource are implemented by a procedure call to a protected object, and tasks do not share state.
Implementing Events
An event's role in the implementation is identified by its parent in the task body. A description follows, in general terms, of the possible implementations of an event.
Note: An event can be to referred only once in a task body specification. Of course, shared events (in Shared machines) can be re-used, but this is done through synchronization. The task body only refers to local events
- Event roles in implementation:
- Branching: an event is split in the implementation; guards are mapped to branch conditions, and actions are mapped to the branch body. If the branch synchronizes with a Shared machine's event then this is mapped to a procedure call.
- Looping: as in branching, the event is split; the guard maps to the loop condition, and actions to to loop body. If the event synchronizes with a Shared Machine event then it is mapped to a procedure call.
- Event: if the event is not contained in a branch or loop then it is one of the following:
- A local-only event - the event only contains local updates, which are expanded to update actions in the implementation. In this case guards not permitted in the event.
- A synchronizing event - local updates are expanded to become update actions in the implementation, remote updates are performed by subroutine call. Guards in the remote event may block; in Ada this is implemented as an entry barrier, and in C can be implemented using a pthread condition variable.
Theories, for Generating Code
See The Use of Theories in Code Generation
State-Machines and Code Generation
See State-Machines and Code Generation